
www.auto-innovazioni.com
18
'23
Written on Modified on
Analog Devices introduce il sensore di posizione multigiro con una vera funzionalità di accensione
Questo articolo esplora i metodi di rilevamento multigiro True Power-On (TPO) e introduce una soluzione semplificata per ridefinire il mercato del rilevamento della posizione nei settori industriale e automobilistico.
Il sistema semplificato consentirà ai progettisti, con o senza esperienza nella progettazione di sistemi magnetici, di sostituire le soluzioni ingombranti e costose esistenti.
Introduzione
I sensori di posizione e gli encoder sono onnipresenti nelle applicazioni automotive e industriali, dove è fondamentale conoscere in ogni momento la posizione del sistema. Tuttavia, gli encoder e i sensori di posizione tradizionali possono fornire soltanto informazioni sulla posizione di un singolo giro o su 360° TPO. I sistemi che richiedono informazioni sulla posizione TPO su più rotazioni o su un intervallo di misurazione più ampio, di solito incorporano un'alimentazione di backup per tracciare e memorizzare le rotazioni multiple del sensore a singolo giro in caso di interruzione imprevista dell’alimentazione, o per rilevare il movimento a rotazione multipla durante l’arresto o lo spegnimento.
In alternativa, è possibile aggiungere al sistema un meccanismo di riduzione per ridurre le rotazioni multiple ad una singola e, combinato con un sensore a singolo giro, trovare informazioni sulla posizione multigiro TPO. Queste soluzioni sono costose e ingombranti e, nel caso del sistema di alimentazione di backup a batteria, richiedono un contratto di manutenzione regolare.
Gli encoder rotativi e lineari sono dispositivi chiave utilizzati nelle applicazioni in cui il progettista del sistema deve garantire che la posizione di un sistema meccanico sia sempre nota per il controllo a ciclo chiuso, anche in caso di perdita di potenza, sia essa parte del normale ciclo operativo o accidentale. La sfida per i progettisti di sistema consiste nel garantire che la posizione TPO sia disponibile anche dopo una perdita di alimentazione. Se lo stato del sistema viene perso, è necessaria una procedura lunga e spesso complessa per ripristinare il sistema ad uno stato noto.
Soluzioni Tradizionali
Le fabbriche moderne stanno diventando sempre più dipendenti da robot e cobot per ridurre i tempi dei cicli, aumentare la produttività della fabbrica e migliorare l'efficienza. Uno dei principali fattori di costo ed inefficienza associati ai robot standard, ai cobot e ad altre apparecchiature di assemblaggio automatizzate è il tempo di fermo macchina necessario per il riallineamento e l'inizializzazione dell'alimentazione dopo un'improvvisa perdita di alimentazione durante il funzionamento. Ciò comporta tempi di inattività e perdite di produttività costosi e inefficienti. Sebbene questo problema possa essere risolto con batterie di backup, memoria e sensori a giro singolo, queste soluzioni hanno i loro limiti.
Le batterie hanno una durata limitata e richiedono la stipula di contratti di manutenzione/assistenza per gestire la loro sostituzione. In alcuni ambienti, dove sussiste il rischio di esplosione, la massima quantità di energia che può essere immagazzinata nel pacco batterie è limitata. La riduzione della quantità di energia accumulata porta a cicli di manutenzione più brevi, in cui le batterie devono essere sostituite più frequentemente.
Un'alternativa al backup della batteria è l'uso di moduli di raccolta dell’energia a filo di Wiegand. Questi moduli utilizzano un filo trattato in modo particolare, in cui la coercitività magnetica dell'involucro esterno è molto più alta di quella del nucleo interno. Quando un campo magnetico viene ruotato, le coercitività differenti generano picchi di tensione all'uscita del dispositivo. Questi picchi possono essere utilizzati per alimentare circuiti esterni e registrare il numero di giri in una memoria ferroelettrica ad accesso casuale (Ferroelectric Random Access Memory, FRAM). La memoria magnetica multigiro sviluppata da Analog Devices non richiede alimentazione esterna per registrare il numero di rotazioni di un campo magnetico esterno. Ciò comporta una riduzione delle dimensioni e dei costi di sistema.
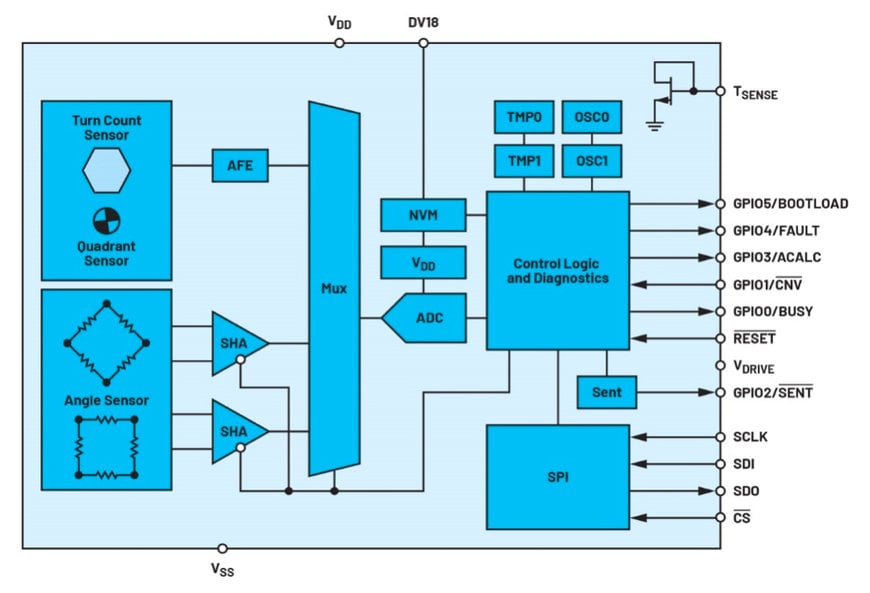
Figura 2. Schema a blocchi del sensore multigiro ADMT4000.
Tecnologia del Sensore Multigiro
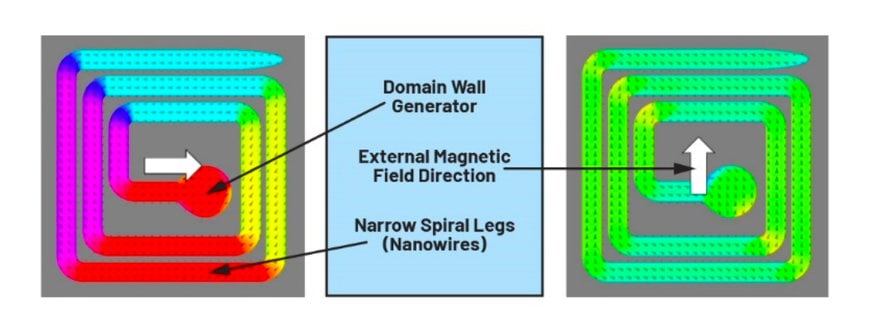
Il cuore del sensore magnetico multigiro è costituito da una spirale di materiale a magnetoresistenza gigante (Giant MagnetoResistance, GMR) composta da molteplici nanofili di elementi GMR. Il principio di funzionamento del sensore si basa sull'anisotropia di forma e sulla generazione di pareti di dominio in presenza di un campo magnetico esterno. Man mano che il campo magnetico esterno ruota, le pareti di dominio si propagano lungo le strette tracce a spirale (nanofili) attaccate al generatore di parete di dominio, come mostrato nella Figura 1.
Quando le pareti del dominio si muovono attraverso le strutture delle gambe a spirale, lo stato di ciascun elemento della gamba a spirale cambia. Poiché gli elementi sono realizzati in materiale GMR, lo stato dei medesimi può essere determinato misurandone la resistenza. Il sensore si basa unicamente sul campo magnetico esterno e non sono necessarie ulteriori alimentazioni di backup o tecniche di raccolta dell’energia (energy harvesting technique) per attivare il conteggio delle rotazioni. Quando il sensore viene alimentato nuovamente, viene resa disponibile una lettura dello stato di conteggio dei giri senza che siano necessarie ulteriori azioni da parte dell'utente o il reset del sistema.
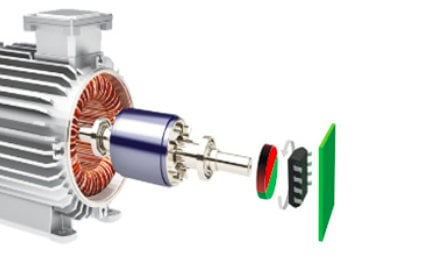
Figura 3. Disposizione di montaggio tipica dell’ADMT4000.
Una Soluzione Tecnologica Combinata che Semplifica il Progetto del Sistema
Il diagramma a blocchi di alto livello dell'ADMT4000, mostrato nella Figura 2, combina il sensore multigiro GMR descritto in precedenza con un sensore angolare AMR ad alta precisione e un circuito integrato di condizionamento del segnale per fornire una soluzione in grado di registrare 46 giri o 16.560° di movimento con un’accuratezza tipica di ±0,25°. Il circuito integrato per il condizionamento del segnale consente ulteriori miglioramenti del sistema per supportare la calibrazione armonica, che può eliminare gli errori dovuti alle tolleranze magnetiche e meccaniche dell'applicazione. L'ADMT4000 fornisce un'uscita digitale assoluta di 46 rotazioni (da 0° a 16.560°) tramite un'interfaccia SPI o SENT. L'ADMT4000 viene posizionato di fronte a un dipolo magnetico montato sull'albero rotante, come illustrato nella Figura 3.
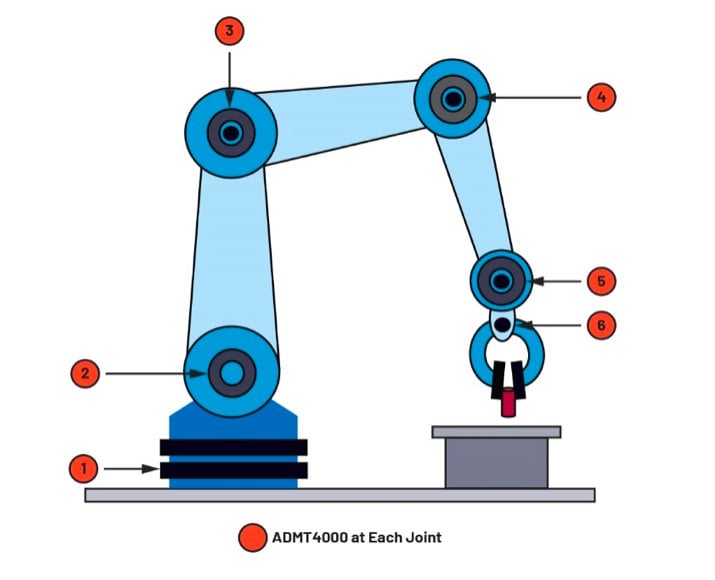
Figura 4. L’ADMT4000 in un’applicazione robot/cobot.
ADI sta preparando un reference design magnetico che consentirà agli utenti con scarse o nessuna capacità di progettazione magnetica di adottare facilmente l'ADMT4000 nelle proprie applicazioni. Oltre al progetto del magnete centrale, questo progetto di riferimento fornirà anche immunità e robustezza ai campi magnetici parassiti, consentendo ai clienti di implementare il sensore in ambienti difficili. I campi parassiti possono essere generati da molte fonti in cui vengono trasportate correnti in un filo, in particolare quando vengono utilizzati in prossimità di motori elettrici o attuatori.
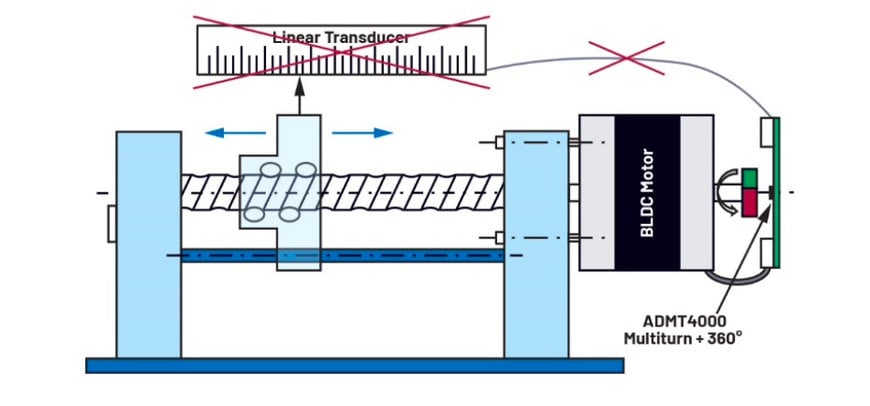
Figura 5. L’ADMT4000 in un’applicazione con attuatore rotativo-lineare.
Le funzionalità dell'ADMT4000 sono preziose in molte applicazioni industriali, tra cui il rilevamento della posizione degli snodi dei bracci di robot e cobot in caso di interruzione dell'alimentazione, o durante lo spegnimento (vedi Figura 4). Altre applicazioni industriali includono il tracciamento assoluto e TPO di tavole x-y nell'automazione industriale, nelle macchine utensili o in applicazioni per apparecchiature mediche (figura 5). Altre applicazioni rotativo-lineari includono, tra l’altro, il conteggio delle rotazioni di avvolgimenti, tamburi, rocchetti, bobine, paranchi, argani e ascensori (Figura 6) quando sono alimentati, o il tracciamento dei movimenti quando sono spenti o durante le interruzioni di alimentazione.
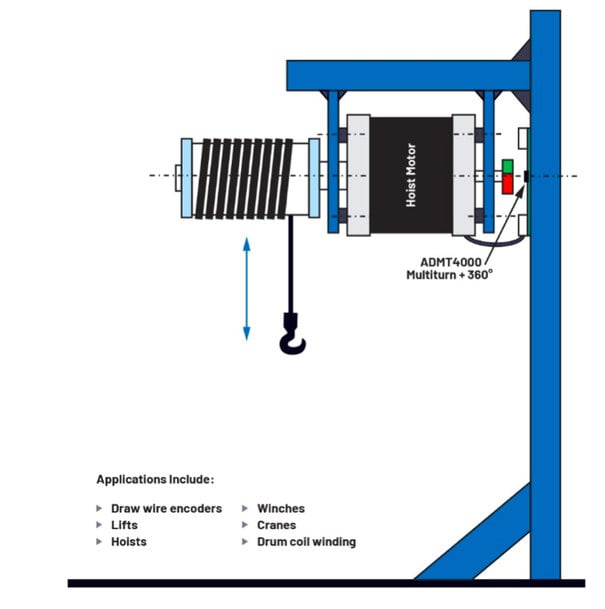
Figura 6. Applicazioni per paranco.
Inoltre, il rilevamento della posizione TPO fornito dall'ADMT4000 ha un’importanza molto significativa per le applicazioni automotive inclusi, tra l’altro, gli attuatori di trasmissione (Figura 5), il servosterzo elettrico (Electrical Power Steering, EPS), compreso lo steer-by-wire (Figura 7), gli attuatori di blocco per parcheggi, altri attuatori general-purpose e i riavvolgitori delle cinture di sicurezza (Figura 8).
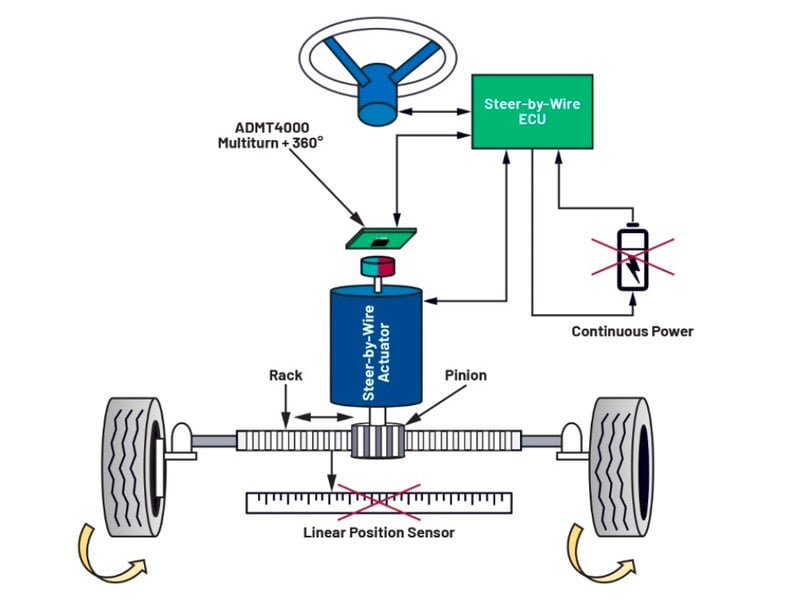
Figura 7. Un’applicazione “steer-by-wire”.
Le dimensioni, il costo e l'intervallo di temperatura operativa dell'ADMT4000 ne consentono l'uso in un'ampia gamma di applicazioni, comprese le applicazioni critiche per la sicurezza nel settore automotive e industriale. Le applicazioni critiche per la sicurezza nel settore automobilistico sono conformi allo standard ISO 26262 e a un particolare livello di integrità della sicurezza automobilistica (Automotive Safety Integrity Level, ASIL). L'ADMT4000 sarà fornito sia come ASIL-QM che come ASIL-B(D) per soddisfare le applicazioni che richiedono o meno la funzionalità avanzata ASIL o SIL.

Figura 8. Un’applicazione sul riavvolgitore di una cintura di sicurezza.
Conclusione
L'ADMT4000 e il primo sensore di posizione multigiro TPO integrato sono destinati a ridurre significativamente la complessità e l'effort di progettazione del sistema, dando vita a soluzioni più piccole, leggere ed economiche. La facilità d'uso dell'ADMT4000 consentirà ai progettisti, con capacità di progettazione magnetica o meno, di aggiungere nuove e migliori funzionalità alle applicazioni attuali e di aprire le porte a molte altre nuove.
Per saperne di più sull'ADMT4000 e sul reference design magnetico, si prega di contattare il team di vendita ADI locale che sarà lieto di discutere le vostre esigenze e applicazioni, oppure visitare il sito analog.com/magnetics.
www.analog.com
Richiedi maggiori informazioni…
